



ترجمه کتاب کاربرد GIS در مهندسی منابع آب - بخش چهاردهم

ساختار برداری و رستری هر دو دارای مزایا و معایبی هستند. هر رویکرد تمایل دارد در موقعیت هایی که در آن اطلاعات مکانی به شیوه ای به ساختار داده ها نزدیک می شود، بهترین کارکرد را داشته باشد. ساختار برداری معمولا برای نشان دادن شبکه ها، اشیاء متصل، و اجزایی که توسط مرزهای مشخص تعریف شده است، بسیار مناسب می باشد. ساختار داده زمانی بهترین کاربرد را دارد که برای بیان خصیصه که در فضا به شکل پیوسته و یکنواخت پخش شده است استفاده گردد. در شبکه های grid ظریفتر، ویژگی های جغرافیایی در ماتریس داده ها وجود خواهد داشت. با این حال دقت مکانی برای اجزاء نقشه در مدل رستری به سبب وضوح سلول های آن محدود می گردد. به طور کلی، مزایای استفاده از ساختارهای برداری شامل یک نمایش خوب از نقطه، خط، و اجزاء چند ضلعی (جریان ها، دریاچه ها، تقسیم بندی های زهکشی، و غیره)؛ فشردگی ذخیره سازی داده ها، گرافیک دقیق، باز نمود رابطه اشیاء و همچنین قابلیت به روز رسانی، اصلاح و تعمیم گرافیک و اجزاء است. و البته معایب آن نیز عبارتند از پیچیدگی ساختار داده ها، پردازش های مفصل برای همپوشانی و شبیه سازی، فناوری و داده های نسبتا گران قیمت، و مشکل درنشان دادن اجزاء مختلف مکانی (Meijerink و همکاران 1994). مزایای استفاده از ساختارهای رستری شامل سادگی ساختار داده ها، همپوشانی و تجزیه و تحلیل مکانی ساده، در دسترس بودن داده ها، و فناوری نسبتا ارزان است. همچنین معایب آن عبارتند از استفاده ناکارآمد هنگام ذخیره سازی در کامپیوتر. عدم دقت در تعریف نقطه، خط و منطقه، مشکل در ایجاد شبکه و توپولوژی و تجسم غیر جذاب در رسترهای با کیفیت پایین (Meijerink و همکاران 1994). جدول 3-1 خلاصه ای از مزایا و معایب هر یک از این دو نوع ساختار داده ها را با نگاهی جامع تر بیان می کند.
تصمیم به استفاده از یک مدل فیلد-داده یا شیء در لزوم بکارگیری برنامه، در آنچه که عرف است و در منبع اصلی داده، یک اصل است. با این حال، پیشرفت در فناوری پایگاه داده GIS، تفاوت میان ساختار داده های برداری و رستری را کمتر متقاعد کننده می کند. ظرفیت ذخیره سازی داده ها همچنان افزایش می یابد، که این موضوع باعث می شود تا از حجم بحرانی ذخیره سازی فایل های رستری کاسته شود، گرچه هنوز هم حجم عظیمی از داده های تصویری حاصل از سنسور های مختلف، نیاز به تصمیم گیری های دشوار برای اولویت دهی در ذخیره سازی دارند. برای بسیاری از برنامه های کاربردی، افزایش وضوح سیستم های تصویرگری، دقت کافی برای نمایش خصیصه های زمین را فراهم می کند. و بعلاوه رشد طولانی مدت ظرفیت کامپیوترها به کاهش مشکلات مربوط به پردازش کمک می کند.
بازنمایی ویژگی متغیرهای مکانی حوضه ها، اغلب در یک سری از مجموعه داده های رستری، که ممکن است شامل اطلاعاتی از قبیل ارتفاع، نوع خاک، و کاربری زمین باشد، قرار دارد. با این حال، قدرت تفکیک مکانی داده های ارتفاعی ممکن است دقت تشخیص جریان های کوچکتر آبراهه ای و نیز سایر منابع آبی این چنینی را که تنها از داده های ارتفاعی استفاده می کنند، مشکل سازد. بهترین قدرت تفکیک مکانی که به شکلی عمده در دسترس قرار دارد در حدود 10 متر است؛ در چنین شرایطی بسیاری از جریان های کوچک ممکن است شناسایی نشوند، و مرزهای زهکشی حتی ممکن است اشتباه تعیین گردند. در این حالت ساختار برداری شبکه آبراهه ها می تواند کمکی برای حل این مشکل باشد. منابع رستری و برداری داده ها برای مسیرهای آبراهه ای و جریانات سطح زمین، در زیر توضیح داده شده است.
3. 4. منابع داده های دیجیتال برای منابع آب
در حال حاضر به شکلی فزاینده داده های گوناگونی در USGS، دیگر آژانس های فدرال و شرکت های مختلف، تولید شده است؛ در ادامه به شرح برخی از آنها خواهیم پرداخت.
3. 4. 1. مدل رقومی ارتفاع
سطوح سه بعدی، یک دسته بندی خاص از سطح می باشد که داده ها در آن بهترین امکان نمایش در فرم سه بعدی بر روی یک ناحیه را دارا می باشند. از متداولترین نمونه ها می توان به terrain ها به عنوان نمونه ای از DEM ها (مدل رقومی ارتفاع)، به شبکه های ارتفاعی به عنوان نمونه TIN ها (شبکه نامنظم مثلثی)، و یا خطوط کنتور در مدل برداری اشاره کرد. یک رستر ارتفاعی با یک مدل دیجیتالی terrain (DTM) معادل گرفته می شود. داده ها در دیگر زمینه ها اغلب از ماهواره ها و دیگر روش های تصویرپردازی به دست می آید. این منابع داده ها اکنون به طور فزاینده ای با تعدد و تنوع گسترده ای از سنسورهای تصاویر رشد می کنند. مدل ارتفاعی دیجیتال به طور کلی با استفاده از روش فتوگرامتری از جفت تصاویر استریو، تصاویر ماهواره ای استریو، و یا با درونیابی داده های ارتفاعی دیجیتالی تولید می شود. تعداد فراوانی از تولیدات ساختار DEM به شکل شبکه grid مربعی و یا خطوط گرافیکی کنتور (DLG ها) می باشند.
DEM های به شکل شبکه grid شامل شبکه مربعی به همراه ارتفاع هر مربع در آن می باشند (شکل 3-7 الف). هر عنصر این شبکه تحت عنوان پیکسل شناخته می شود (برای عناصر تصویر). مکان در این تصاویر با سطر ها و ستون های این شبکه، و با توجه به اطلاعات مرزی این شبکه ها ایجاد می شوند.
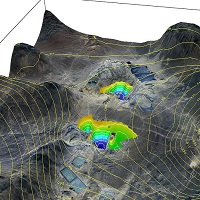
برای ساختارهای TIN، سطح مستمری از مثلث های به هم پیوسته با مقادیر ارتفاع مشخص شده در رئوس این مثلث ها ایجاد می گردد (شکل3-7 ب). برای هر یک از مثلث ها، مکان (x,y) و ارتفاع (z) از راس به همراه اطلاعات توپولوژیکی شناسایی شده از مثلث های مجاور ذخیره می شود. این مثلث ها در اندازه های متفاوتی قرار گرفته اند، از مثلث های کوچکتر در مناطق در حال تغییر سریع توپوگرافی تا مثلث بزرگتر در مناطق با توپوگرافی نسبتا صاف. برای TIN ها، داده های ارتفاعی ممکن است در ابتدا با استفاده از روش فتوگرامتری برای نقاط ارتفاعی و خطوط شکست، مانند نهرها و برآمدگی ها توسعه یافته باشد. ساختار مبتنی بر کانتور از خطوط دیجیتالی توسط مجموعه ای از x,y های جفت شده و تعریف شده، برای مختصات خطوطی از ارتفاعات مشخص مشتق می شود. خطوط کنتور معمولا توسط رقومی سازی کامپیوتری از خطوط موجود بر روی نقشه ها و یا با میان یابی از شبکه بندی های TIN به دست می آید.

شکل 3-7 DEM به عنوان: الف) grid، و ب) TIN.
برای هر یک از ساختارهای DEM می توان مزایا و معایبی را برشمرد (DeBerry 1990 - Moore و همکاران1991). DEM های شبکه مربعی grid به علت سادگی، سهولت پردازش و کارایی محاسباتی به طور گسترده مورد استفاده واقع می شوند؛ و معایب آنها عبارتند از: وابستگی سایز شبکه grid به برخی از پارامترهای چشم انداز های محاسبه شده، و عدم توانایی تغییر سایز برای تغییر در کاراکترهای پیچیده چشم انداز. TIN ها برای توپوگرافی پیچیده، مانند اجزاء زهکشی شهری (به عنوان مثال، خطوط طوقه خیابان) ارجح هستند. با این حال محاسبات با استفاده از داده های TIN مشکل تر از داده DEM های شبکه مربعی-grid است. ساختار مبتنی بر خطوط کانتور توسط برخی برای ارائه تصویری بهتر از اجزاء سطوح نسبت به DEM های شبکه grid در نظر گرفته می شود. که در هر صورت خطوط کنتور تک بعدی می باشند و برای ارائه تصویر بهتری از چشم انداز به شکل کلی نیاز به داده های بیشتری نسبت به نمونه DEM های شبکه grid می باشد (Moore و همکاران 1991). باید بیان داشت که مزایا و معایب سازه های DEM نسبی است، به این معنا که آنچه به عنوان یک مزیت برای ذخیره سازی داده ها در نظر گرفته شده است، ممکن است یک نقطه ضعف برای پردازش داده ها هم باشد. بیشترین GIS ها دارای توابعی برای تبدیل بین سطح های مختلف، بسته به الزامات برنامه می باشند.
سه محصول DEM برای مرزهای مشترک ایالات متحده برای چندین سال از طریق مرکز داده EROS ارائه گردیده است:
- بزرگ مقیاس، DEM های 5/7 دقیقه (حدود مقیاس 1:24000) در هر دو 30 متر و 10 متر وضوح تصویر
- متوسط مقیاس، DEM های 15 دقیقه (حدود مقیاس 1:100000) در وضوح تصویر 60 متر
- کوچک مقیاس، DEM های 1 درجه (حدود مقیاس 1:250000) در وضوح تصویر 90 متر
از آنجا که این داده ها در بلوک هایی ارائه شده است، اغلب مشکلات در تطبیق لبه بلوک های مجاور داده های DEM بوجود می آیند، و قاچ ها و درزها را زمانی که بلوک هایی با هم ادغام شوند بروز خواهند کرد. برای غلبه بر این مشکلات، USGS پایگاه ارتفاع ملی (NED) را به عنوان یک موزایک بدون درز از بهترین داده های ارتفاعی موجود توسعه داده است. اگر چه داده های ارتفاعی 5/7 دقیقه برای مرز مشترک ایالات متحده منبع اطلاعات اولیه هستند، امروزه از روش های پردازش و فیلترینگ کارآمد برای ارائه یک دیتوم و سیستم تصویر سازگار، تطبیق گری لبه ها، پر کننده قاچ های از دست رفته داده ها در درزهای چهارگوش، و تبدیل همه مقادیر ارتفاع به متر دهدهی استفاده گردیده است. هنگام نگارش این کتاب، وضوح داده ها در سطح 1 arc-second (حدود وضوح 30 متر) در سراسر کشور ایالات متحده، با پوشش حدود 70٪ برای یک سوم arc-second (با وضوح تصویر 10 متر) موجود می باشد.
برای نقشه برداری بسیار دقیق از عوارض زمین، از جمله، الزامات تعریف جزئیات دشت سیلابی است، که با استفاده از وسیله نوریاب (LIDAR) داده توسعه یافته است. این روش با لیزر aircraftmounted قادر به جمع آوری مقادیر داده های بدست آمده از اندازه گیری ارتفاع در نرخ 2000-5000 پالس در هر ثانیه و دقت عمودی 15 سانتی متر (6 اینچ) است. ابزار LIDAR تنها برای جمع آوری داده های ارتفاعی ساخته شده است. برای اینکه این داده ها مکانی و شناسه (مرتبط) شوند، موقعیت برداشت نقاط داده ها باید شناخته شود، که به همین سبب آنتن دقیق سیستم موقعیت یابی جهانی (GPS) بر روی بدنه بالای هواپیما نصب شده است. همانطور که سنسور LIDAR نقاط داده ها را جمع آوری می کند، محل داده ها به طور همزمان توسط سنسور GPS ثبت می شود. پس از پرواز، داده ها را دانلود و با استفاده از نرم افزار های کامپیوتری که به طور ویژه برای این امر طراحی شده اند، پردازش می کنند. محصول نهایی، از لحاظ موقعیت جغرافیای ثبت شده، طول جغرافیایی، عرض جغرافیایی، و ارتفاع (x,y,z) برای هر نقطه داده، بسیار دقیق است. این محصول نهایی (x,y,z) امکان ایجاد یک مدل رقومی ارتفاع (DEM) را از سطح زمین خواهد داد.
استفاده از LIDAR هزینه های عمده ای در بر خواهد داشت، به عنوان مثال در نقشه برداری دشت های سیلابی، حذف پوشش گیاهی، که شامل پس پردازش داده ها برای تولید اطلاعات دیجیتال لخت زمین است، از این نمونه می باشد. برای بدست آوردن این داده های ارتفاعی زمین-لخت ، که جهت از بین بردن نقاطی که اجزاء ارتفاعی در آنها خرد گشته از پس پردازش خودکار و دستی استفاده می شود؛ که این امر باعث بوجود آمدن حفره داده می شود، به طوری که مجموعه داده ها را با توجه به فاصله نقطه بر روی زمین نامنظم تر می سازد. پس پردازش خودکار شامل روش های کامپیوتری می شود، این روش ها تغییرات ارتفاعی را که غیر طبیعی به نظر می رسد، تشخیص می دهد. به عنوان مثال، بام ها با سهولتی نسبی به دلیل تغییرات ناگهانی ایی که بین ارتفاع حیاط و بام وجود دارد شناسایی می شوند. با این حال، تشخیص پوشش های گیاهی چالش های سخت تری را برای روش های خودکار فراهم می کند. در مقابل، پس پردازش دستی، دقیق تر (و البته پر هزینه تر) است و به طور معمول شامل پوشش داده نقاطی در تصویر سازی دیجیتالی است؛ که امکان تحلیل برای دیدن جایی که نقاط لیزری به زمین برخورد کند را فراهم می کند.
ترجمه از: بهزاد سرهادی

مدیر سایت: بهزاد سرهادی کارشناس ارشد مهندسی آب
شناسه تلگرام مدیر سایت: SubBasin@
نشانی ایمیل: behzadsarhadi@gmail.com
(سوالات تخصصی را در گروه تلگرام ارسال کنید)
_______________________________________________________
پروژه تخصصی در لینکدین
 در منابع آب
در منابع آب























نظرات (۰)